AIM OF DEVELOPMENT [(US)]
AIM OF DEVELOPMENT [(US)]
SM2333814
id0000001001x1
Vehicle Outline
External view
4SD
am3zzn00006721
|
5HB
am3zzn00006723
|
Interior design
am3zzn00006722
|
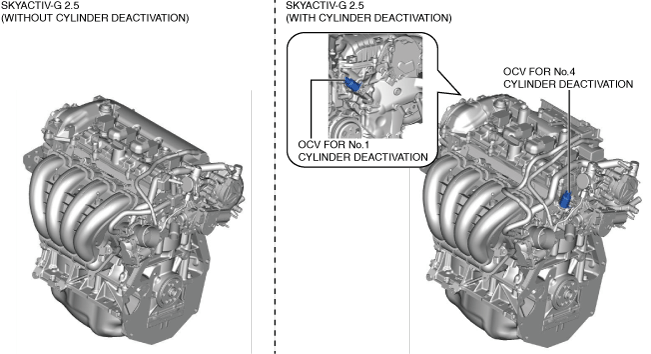
Engine
-
• SKYACTIV-G 2.0, SKYACTIV-G 2.5(without cylinder deactivation),SKYACTIV-G 2.5 (with cylinder deactivation) have been adopted.
-
Engine mechanical [SKYACTIV-G (without cylinder deactivation)]
-
• For SKYACTIV-G 2.0 and SKYACTIV-G 2.5 (without cylinder deactivation), the following have been adopted to lower fuel consumption.
-
― Improvement of mechanical resistance loss
-
• Narrowed down crankshaft journal• Optimized piston skirt shape• Lowered piston ring tension• Roller follower adopted• Reduction of valve spring load• Stabilization of timing chain behavior• Optimized engine coolant passage• Optimized water pump impeller shape• Lowered drive belt tension• Optimized oil passage• Optimized oil pump shape• Oil pump discharging pressure control has been adopted.
-
-
― Improvement of pumping loss
-
• Variable valve timing mechanism has been adopted on both sides of intake and exhaust.
-
-
― Improvement of cooling loss
-
• Coolant control valve adopted• Optimized engine coolant passage
-
-
-
Engine mechanical [SKYACTIV-G (with cylinder deactivation)]
-
• For SKYACTIV-G 2.5 (with cylinder deactivation) the following have been adopted to lower fuel consumption.
 ac5uun00003731
ac5uun00003731-
― Improvement of pumping loss
-
• Cylinder deactivation control adopted
-
-
― Cooling loss improvement
-
• Coolant control valve adopted• Optimized engine coolant passage
-
-
-
Engine control [SKYACTIV-G (without cylinder deactivation)]
-
• L-jetronic and D-jetronic type detectors have been combined for intake air amount detection, improving the accuracy of the intake air amount measurement.• Valve timing control has been adopted on both sides of the intake and exhaust, improving fuel economy and emission performance.
-
― Intake side: Electric variable valve timing control― Exhaust side: Hydraulic variable valve timing control
• Engine oil control has been adopted reducing engine load.• The engine coolant control valve adjusts the engine coolant control valve opening angle and supplies engine coolant to the appropriate engine coolant passage according to the changes in the engine coolant temperature.• Further engine warming has been promoted by blocking each water passage while the engine is cool.-
― Coolant control valve adopted
• With the adoption of fuel pump control, fuel pump power consumption has been reduced, improving fuel economy. -
-
Engine control [SKYACTIV-G (without cylinder deactivation)]
-
• The engine coolant control valve adjusts the engine coolant control valve opening angle and supplies engine coolant to the appropriate engine coolant passage according to the changes in the engine coolant temperature.• Further engine warming has been promoted by blocking each water passage while the engine is cool.
-
― Coolant control valve adopted
• Pumping loss due to intake/exhaust stroke is reduced to improve fuel economy during low engine loads.-
― Cylinder deactivation control adopted
-
Suspension
-
• Front suspension
-
― Strut-type suspension adopted― The connection area of the front crossmember and body is a 6-point rigid mount type.am3zzn00007907
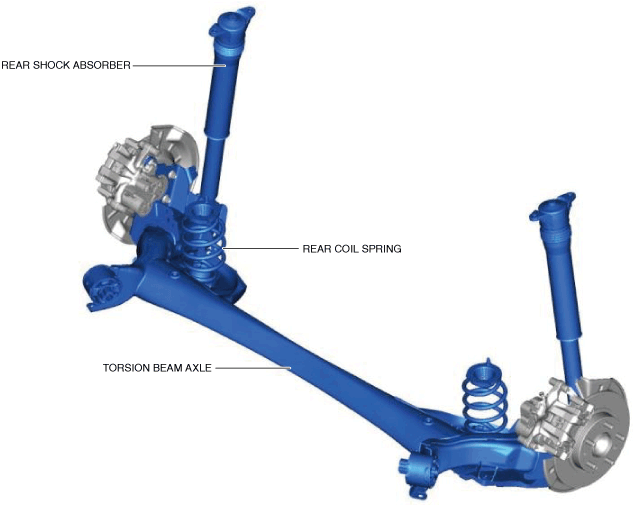
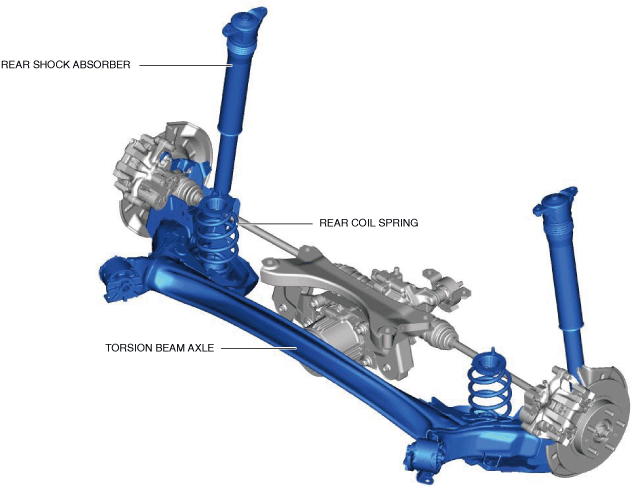
• Rear suspension-
― Torsion beam axle-type rear suspension has been adopted.― Large-size rubber bushing has been adopted for the rear trailing arm bushing to enhance the handling performance and the ride comfort.
2WD
am3zzn00006758AWD
am3zzn00009757
-

Driveline/axle
-
• Unit-design, double angular ball bearings with low rotational resistance have been adopted for the front and rear axles.• Unit bearings that require no preload adjustment have been adopted for the front and rear wheels.• The following parts have been adopted to reduce vibration and noise:
-
― Bell-shaped constant velocity joint has been adopted for the wheel-side joint of the front drive shaft.― A tripod-shaped constant velocity joint has been adopted for the differential-side joint of the front drive shaft.― Double offset-type constant velocity joint has been adopted for the differential-side joint (RH) of the front drive shaft. (MTX)― Tripod-shaped constant velocity joint has been adopted for the differential-side joint of the front drive shaft. (ATX)― For AWD vehicles, bell-shaped constant velocity joint has been adopted for the wheel-side joint of the front and rear drive shaft.― For AWD vehicles, a tripod-shaped constant velocity joint has been adopted for the differential-side joint of the front drive shaft.― For AWD vehicles, a double offset-shaped constant velocity joint has been adopted for the differential-side joint of the rear drive shaft.― For AWD vehicles, 2-part, 1-joint type propeller shaft with middle shaft bearing has been adopted.
-
-
• For AWD vehicles, the following parts have been adopted to improve off-road mobility and handling stability:
-
― i-ACTIV AWD system which automatically and optimally controls drive torque distribution for the front and rear wheels.― Rear differential which integrates the coupling component to reduce size and weight.
-
-
• Ball bearings/tandem ball bearings with low rolling resistance have been adopted for the inside of the rear differential and transfer.
Brakes
-
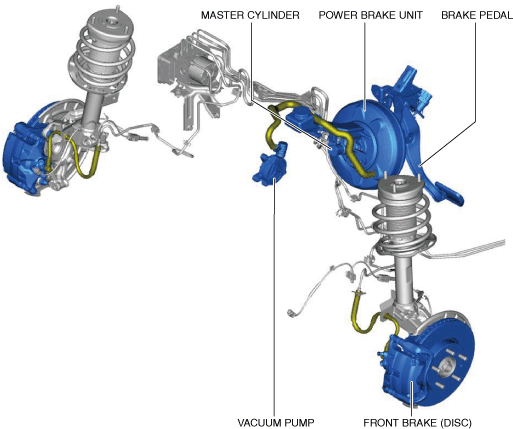
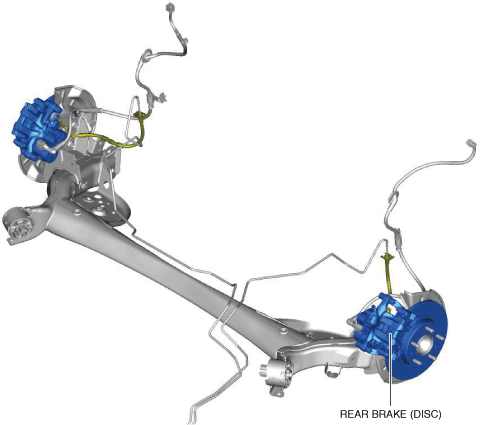
• Conventional brake system
-
― A brake pedal with an anti-intrusion mechanism has been adopted. As a result, driver safety has been improved.― A vacuum pump has been adopted, improving braking force.― A large diameter, ventilated disc-type front brake has been adopted, improving braking force.― A large diameter, solid disc-type rear brake has been adopted, improving braking force.
•Vehicle front side
am3zzn00006761Vehicle rear side
am3zzn00007909 -
-
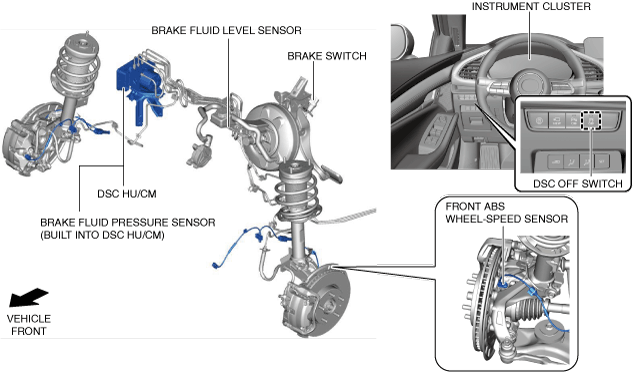
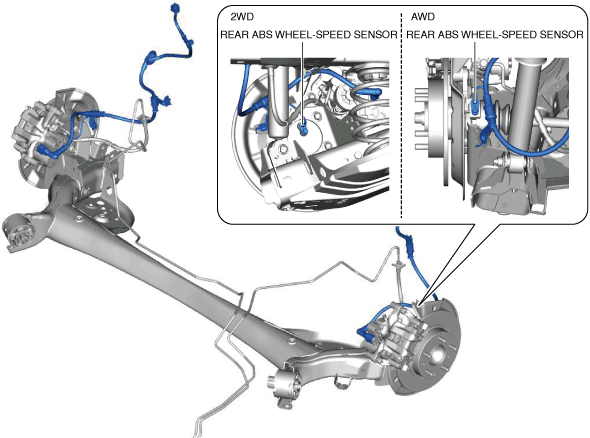
• Dynamic stability control
-
― Electrical brake assist control has been adopted, improving safety.― The DSC HU/CM, integrating both the hydraulic unit (HU) and control module (CM), has been adopted, resulting in a size and weight reduction.― An enhanced malfunction diagnosis system, used with the Mazda Modular Diagnostic System (M-MDS), has been adopted, improving serviceability.― Serviceability has been improved by the automatic configuration function.― The system now receives the lateral-G, longitudinal-G, and yaw rate signals between the Sophisticated Air bag Sensor (SAS) control module and the DSC HU/CM via Controller Area Network (CAN) lines instead of the conventional combined sensor.― Hill launch assist (HLA) and secondary collision reduction have been adopted, improving safety.
Vehicle front side
am3zzn00009805Vehicle rear side
am3zzn00009754
-
Transaxle
-
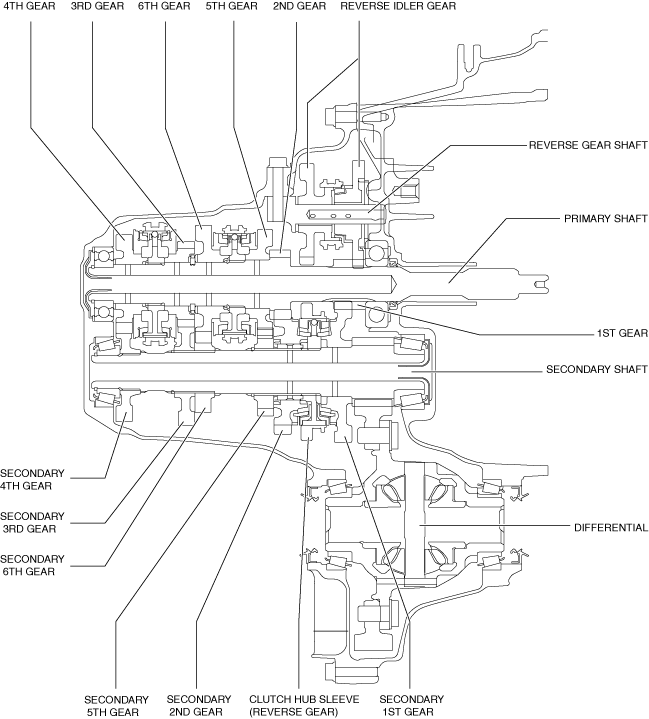
• For SKYACTIV-G 2.0 and SKYACTIV-G 2.5, six-speed C66M-R manual transaxle has been adopted.am3uun00001754
-
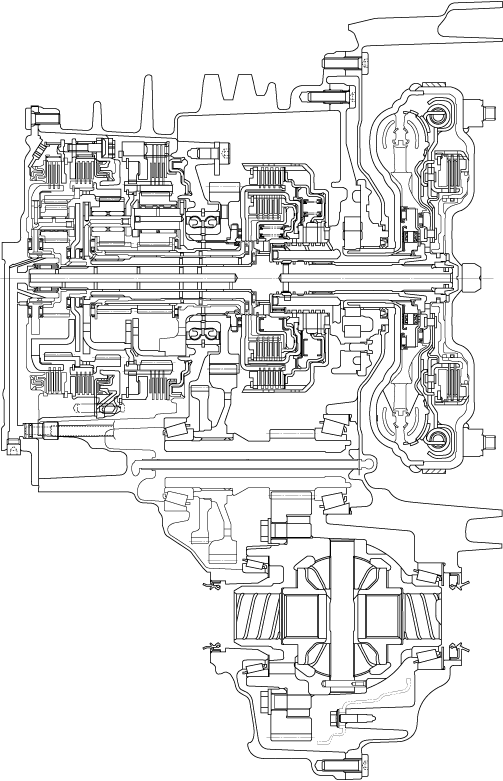
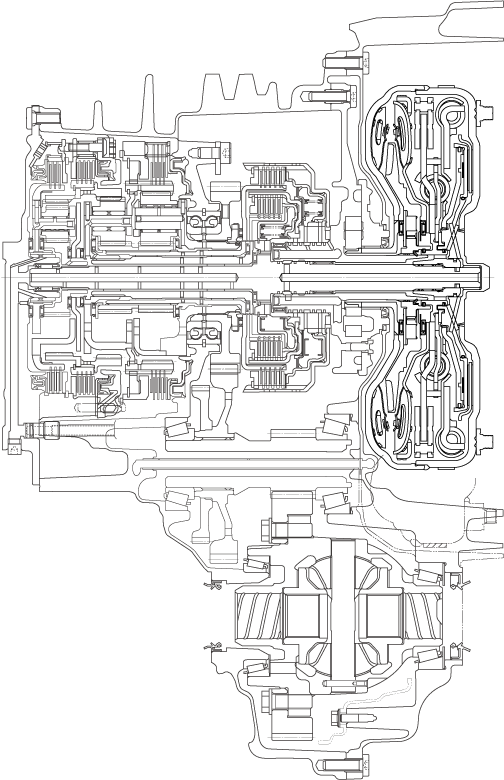
• For SKYACTIV-G 2.0 and SKYACTIV-G 2.5(without cylinder deactivation), six-speed ET6A-EL automatic transaxle has been adopted.am3zzn00006875
-
• SKYACTIV-G 2.5 (with cylinder deactivation), six-speed EV6A-EL and EV6AX-EL automatic transaxle has been adopted.atsuzn00000625
Steering
-
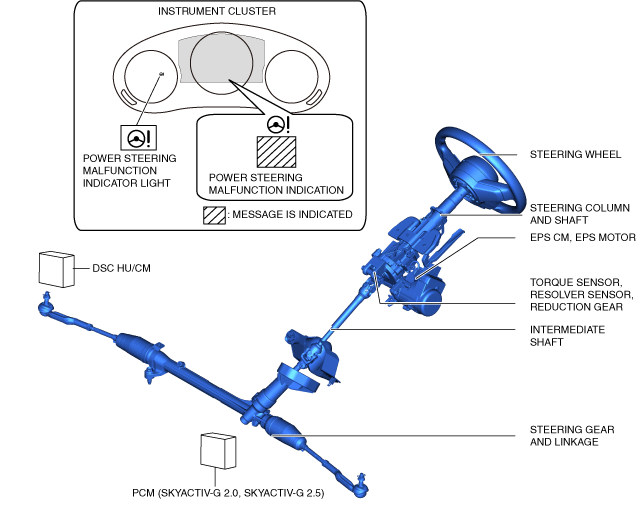
• Power steering
-
― A column-assist type electric power steering (EPS) has been adopted with a motor installed to the steering column to assist in the steering force.― The size and weight of the system have been reduced by integrating the EPS control module (CM) and the EPS motor.― The EPS achieves smooth handling performance from low to high speed and excellent steering feel by the vehicle speed response control.― A steering column and shaft with a shock-absorbing mechanism has been adopted.― A steering column with a tilt/telescoping mechanism has been adopted allowing fine adjustment of the steering wheel position according to the driving posture of the driver.― The automatic configuration function and the steering wheel angle neutral position auto-learning function have been adopted.
-
atsuzn00000553
|
HEATER, VENTILATION AND AIR CONDITIONING
-
• A variable displacement, swash plate type A/C compressor has been adopted which increases or decreases the quantity of refrigerant compression depending on the vehicle conditions.• A dash-electrical supply unit has been adopted which controls the air conditioner system.• A dash-electrical supply unit built into the blower fan controller has been adopted.• LIN communication control has been adopted for control of the air intake actuator, air mix actuator, and the mode actuator.• A climate control unit has been adopted with which the airflow temperature setting for the driver and passenger sides can each be adjusted independently. (full-auto air conditioner)
RESTRAINTS
Standard deployment air bag control system
×: Applicable—: Not applicable
|
Seat position |
Air bag module |
Seat belt |
||||||
|---|---|---|---|---|---|---|---|---|
|
Driver-side air bag module |
Passenger-side air bag module |
Knee air bag module |
Side air bag module |
Curtain air bag module |
ELR (Emergency Locking Retractor) |
Load limiter |
Front pre-tensioner seat belt |
|
|
Driver’s seat
|
×
|
—
|
×
|
×
|
×
|
×
|
×
|
×
|
|
Passenger’s seat
|
—
|
×
|
—
|
×
|
×
|
×
|
×
|
×
|
|
Rear seat (LH/RH)
|
—
|
—
|
—
|
—
|
×
|
×
|
—
|
—
|
|
Rear seat (center)
|
—
|
—
|
—
|
—
|
—
|
×
|
—
|
—
|
Two-step deployment air bag control system (US/CANADA spec.)
|
Seat position |
Air bag module |
Seat belt |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
Driver-side air bag module |
Passenger-side air bag module |
Driver-side knee air bag module |
Passenger-side knee air bag module |
Side air bag module |
Curtain air bag module |
ELR (Emergency Locking Retractor) |
Load limiter |
ALR (Automatic Locking Retractor) |
Front pre-tensioner seat belt |
|
|
Driver’s seat
|
×
|
—
|
×
|
—
|
×
|
×
|
×
|
×
|
—
|
×
|
|
Passenger’s seat
|
—
|
×
|
—
|
×
|
×
|
×
|
×
|
×
|
×
|
×
|
|
Rear seat (LH/RH)
|
—
|
—
|
—
|
—
|
—
|
×
|
×
|
—
|
×
|
—
|
|
Rear seat (center)
|
—
|
—
|
—
|
—
|
—
|
—
|
×
|
—
|
×
|
—
|
i-ACTIVSENSE
-
Active safety technology
-
• The active safety technology is designed to support safe and assured driving, and to prevent accidents.• The active safety technology consists of the following systems.
|
System
|
Outline
|
Reference
|
|
Mazda Radar Cruise Control (MRCC) system
|
The Mazda radar cruise control (MRCC) system can perform headway control and maintain a constant speed at a set vehicle speed and distance from a vehicle ahead using a front radar sensor and forward sensing camera (FSC) which detects the vehicle ahead without the driver having to depress the accelerator or brake pedal. Additionally, if the detecting vehicle approaches the vehicle ahead too closely such as when the vehicle ahead is braking suddenly, the system alerts the driver using a warning sound and warning indication.
|
|
|
Mazda Radar Cruise Control with stop & go function (MRCC with stop & go function) system
|
The Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function) uses a front radar sensor and the forward sensing camera (FSC) to detect a vehicle ahead, and performs headway control to maintain a constant distance from a vehicle ahead without the driver having to depress the accelerator or brake pedal. In addition, the detecting vehicle stops when the vehicle ahead stops, and headway control resumes by operating the RES switch/accelerator pedal after the vehicle ahead moves again. This reduces the strain of operating the vehicle such as during long-distance driving, driving at high speeds, and while in heavy traffic. If the detecting vehicle approaches the vehicle ahead too closely such as when the vehicle ahead is braking suddenly, the system alerts the driver using a warning sound and warning indication.
|
|
|
Traffic Jam Assist (TJA)
|
• The Traffic Jam Assist (TJA) reduces the strain of operating the vehicle on the highway or motorways using headway control function and steering assist function.
• The Traffic Jam Assist (TJA) performs vehicle speed control at a constant speed by user setting and headway control to maintain a constant distance from a vehicle ahead without the driver having to depress the accelerator or brake pedal.
• When the detected vehicle ahead stops the monitoring vehicle stop, and headway control resume after the vehicle ahead moves again (Automatic transmission vehicle).
• If the monitoring vehicle approaches the vehicle ahead too closely, the system alerts the driver using a warning sound and warning indication. In addition, the steering assist function assists to help keep the vehicle within the lane lines. If the system does not detect the lane lines, the system assists to help keep the vehicle along the motion path with the vehicle ahead.
|
(See . TRAFFIC JAM ASSIST (TJA))
|
|
Distance & Speed Alert (DSA)
|
The distance & speed alert (DSA) warns the driver using the multi-infomation display based on the calculated time to the vehicle ahead.
|
|
|
Lane-keep assist system
|
• The lane-keep assist system provides steering assistance to help the driver stay within the vehicle lane if the vehicle might be deviating.
• The forward sensing camera (FSC) detects the white lines (yellow lines) of the vehicle lane in which the vehicle is traveling and if the system determines that the vehicle may deviate from its lane, it operates the electric power steering to assist the driver’s steering operation.
|
|
|
Lane Departure Warning System (LDWS)
|
The Lane Departure Warning System (LDWS) recognizes vehicle lane lines on a road using the forward sensing camera (FSC) installed to the windshield, and if the vehicle departs from its lane unknowingly by the driver, the system alerts the driver of the lane departure using a warning indication and warning sound.
|
|
|
High Beam Control (HBC) System
|
The High Beam Control (HBC) system turns the headlights HI off when the forward sensing camera (FSC) installed to the windshield recognizes a vehicle ahead and when traveling through towns and cities while the vehicle is being driven with the headlights HI turned on. Due to this, blinding of other vehicles from headlight glare is prevented and driver visibility is assured.
|
|
|
Adaptive Front Lighting System (AFS)
|
The adaptive front lighting system (AFS) is a system which enhances the range of visibility when the headlights are turned on by pointing the optical axis of the headlights in the direction in which the vehicle is advancing according to the steering operation.
|
|
|
Blind Spot Monitoring (BSM) system
|
The blind spot monitoring (BSM) system detects vehicles approaching from behind using radar and alerts the driver of the presence of an approaching vehicle. In addition, if the turn switch is operated when a vehicle is approaching from behind, it warns the driver by operating the warnings.
|
|
|
Front Cross Traffic Alert (FCTA) system
|
• The front cross traffic alert (FCTA) is designed to assist the driver in checking both sides of the vehicle when the vehicle starts to drive at an intersection.
• The front cross traffic alert (FCTA) detects vehicle approaching from the blind spots on the front left and right sides of the vehicle when the vehicle starts to drive at an intersection, and notifies the driver of possible danger using the warning indication on the display and the warning sound.
|
|
|
Rear Cross Traffic Alert (RCTA) system
|
The rear cross traffic alert (RCTA) system detects vehicles approaching from behind using radar and alerts the driver of the presence of an approaching vehicle.
|
|
|
Driver Attention Alert system
|
• The driver attention alert system warns the driver using the warning display and sound if it detects the driver’s lack of attentiveness.
• The driver attention alert system activates the warning if the driver’s attention decreases due to driving long distances for long periods causing the vehicle to sway.
|
|
|
Driver Monitoring (DM)
|
The driver monitoring (DM) detects an action state of the driver (looking away, drowsiness level) by the camera inside the vehicle and the vehicle information. If the system determines dangerous driving (looking away), it ensures the driver safety by warning display, warning sound and start of automatic braking.
|
(See DRIVER MONITORING (DM))
|
|
Traffic Sign Recognition system (TSR)
|
• The traffic sign recognition system (TSR) provides support for safe driving by displaying traffic signs on the active driving display or by notifying the driver of excessive speed.
• The traffic sign recognition system (TSR) helps prevent accidents caused by overlooking traffic signs by automatically displaying the traffic signs on the active driving display where the driver can easily recognize them.
|
|
|
360° View Monitor system
|
• The 360° view monitor system is technology created from Mazda’s safety philosophy stated as the reduction of accident occurrence risk itself, and which is particular to the recognition support function.
• The 360° view monitor system displays the images shot by the four cameras (front camera, side cameras (LH, RH), rear mount camera) equipped to the vehicle at the viewpoints from the front/back, left/right, and above the vehicle on the center display, and supports the driver in recognizing risks in the driver’s blind spot areas.
|
(See 360°VIEW MONITOR SYSTEM.)
|
-
Pre-crash safety technology
-
• The pre-crash safety technology is designed to assist the driver in averting collisions or reducing their severity in situations where they cannot be avoided.• The pre-crash safety technology consists of the following systems.
|
System
|
Outline
|
Reference
|
|
Smart Brake Support (SBS)
|
• The Smart Brake Support (SBS) warns the driver using the warning indication in the active driving display or multi-information display and warning alarm sounds when the front radar sensor, ultrasonic sensor and forward sensing camera (FSC) detect a vehicle ahead, pedestrian or bicycle, and if there is the possibility of a collision .
• If the possibility of a collision increases, it operates the brakes automatically to decrease the damage from the possible collision.
|
(See SMART BRAKE SUPPORT (SBS).)
|
|
Smart Brake Support [Rear] (SBS-R)
|
The Smart Brake Support [Rear] (SBS-R) system is designed to apply the brakes automatically to reduce the damage from a possible collision if the driver fails to confirm the safety at the rear while reversing resulting in an increased possibility of a collision with vehicles or obstructions at the rear of the vehicle.
|
|
|
Smart Brake Support [Rear Crossing] (SBS-RC)
|
The Smart Brake Support [Rear Crossing] (SBS-RC) system is designed to apply the brakes automatically to reduce the damage from a possible collision with vehicles crossing from rear side of the vehicle when the vehicle is reversing to get out of the parking lot.
|